隨著橋梁、隧道與管線等大型基礎設施邁入老化階段,結構健康監測 (SHM) 已成為國際工程界關注的重要課題。國立中央大學土木工程學系林子軒教授帶領「機器人與基礎設施感測實驗室」,成功研發具備自主布設能力的「ROADRobot」分布式光纖自動化布設機器人,可大幅縮短分布式光纖感測 (DFOS) 的安裝時間並提升施作品質。研究成果已獲營建自動化領域頂尖期刊《Automation in Construction》接受刊登。該期刊於 Web of Science「土木工程 (Engineering, Civil)」分類中排名第 1 名 (1/117, Q1),影響因子達 11.5,為國際土木工程領域最具指標性的學術舞台之一。
林子軒教授指出,分布式光纖感測技術可沿著數公里長的光纖連續量測應變與溫度,被視為次世代結構健康監測的核心技術。傳統光纖布設仰賴人工點膠、貼附與整型,膠珠厚薄不均直接影響感測精度,在橋梁箱型梁、隧道內壁等高處或密閉空間作業,工人更須冒著高空墜落與通風不良的風險。感測技術已經成熟,真正卡住產業化的是『最後一哩路』的施工瓶頸。
ROADRobot 採用模組化三層式架構,在僅 500 × 300 × 300 公釐、約 7 公斤的緊湊機體內,整合五套關鍵子系統。包含可穩定控制光纖張力的閉迴路張力調節系統、可依行進速度同步調節膠量的精密點膠系統,雙紅外線循跡導航與後置整型刮刀等設計。其中,閉迴路張力調節系統可將光纖張力穩定維持於 0.5 至 2.0 牛頓;雙紅外線導航系統則能達成毫米級橫向偏差控制,確保光纖布設品質與應力傳遞穩定性。整體系統由微控制器搭配 FreeRTOS 即時作業系統管控,並可透過 MQTT 通訊協定遠端遙控。
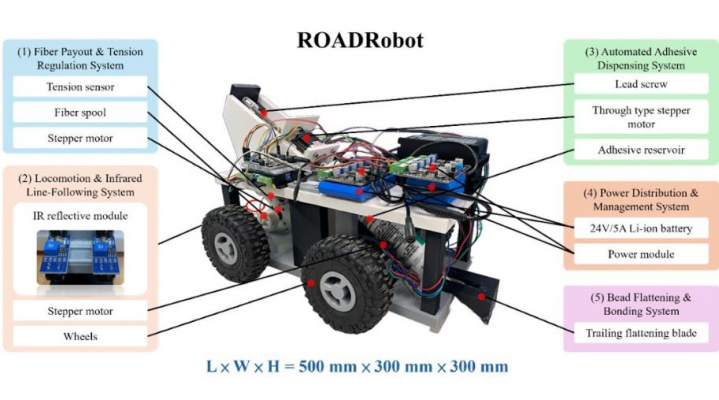
ROADRobot 系統架構與五大關鍵子系統:包含光纖張力調節、紅外線循跡、自動化點膠、電源管理與膠珠整型系統。照:國立中央大學林子軒教授提供提供
ROADRobot 於中央大學大型力學館完成光纖布設測試,可沿預設軌跡自主前進,並同步完成光纖布設與膠材塗布。實驗顯示,機器人不僅可在密閉空間中穩定完成光纖布設,橫向偏差控制維持於 2 公釐內,完成 2 公尺布設僅需 66 秒,且光纖未受損,顯示自動化布設技術兼具效率、穩定性與施工安全優勢。
林子軒教授未來將與加州大學柏克萊分校 Kenichi Soga 教授團隊深化合作,將 ROADRobot 的研究成果延伸至管線監測應用。Soga 教授為國際著名分布式光纖感測權威,近期親訪中央大學大型力學館,於 HDPE 管線測試設施前與主持人共同討論後續研究方向。雙方將攜手探索自動化光纖布設技術於地下水管、油氣管與下水道系統長期監測的可行性,期為智慧基礎設施監測產業注入新動能。